MPC based gait generation and kinematic control for the Robotis OP3 humanoid (video).
SET UP GUIDE
- Install ROS Kinetic or Melodic. It probably works also on Noetic but it has not been tested there yet.
- Install the ROBOTIS OP3 ROS packages and all the required dependencies (starting from 1.1.2.4. Installing additional applications for ROBOTIS ROS Package). If using ROS Melodic you may also need to: manually clone the repository humanoid_msgs into the /src directory, install sbpl (type from terminal sudo apt-get install ros-melodic-sbpl), install ros control (type from terminal sudo apt-get install ros-melodic-ros-control, sudo apt-get install ros-melodic-ros-controllers, sudo apt-get install ros-melodic-gazebo-ros-control).
- Navigate into the catkin workspace of the robotis packages and clone this repository inside the directory /src/ROBOTIS-OP3.
- Navigate into the directory /src/ROBOTIS-OP3/Robotis-OP3-MPC-walking/mpc_walking_demo and clone there the blasfeo and hpipm repositories. Alternatively, you can unzip the file blasfeo&hpipm.zip (which is inside /src/ROBOTIS-OP3/Robotis-OP3-MPC-walking/mpc_walking_demo) and place the blasfeo and hpipm directory inside the /mpc_walking_demo directory.
- Copy and paste the file /src/ROBOTIS-OP3/Robotis-OP3-MPC-walking/mpc_walking_demo/robotis_op3.urdf inside /src/ROBOTIS-OP3-Common/op3_description/urdf.
- Navigate to the file /src/ROBOTIS-OP3/op3_kinematics_dynamics/include/op3_kinematics_dynamics/op3_kinematics_dynamics_define.h and modify (around line 29)
#define MAX_ITER
to
#define MAX_ITER_
- Compile the packages (type from terminal inside the catkin workspace)
catkin_make -DCMAKE_BUILD_TYPE=Release
- In order to run the gazebo simulation, open a new terminal and type (inside the catkin workspace)
source devel/setup.bash
roslaunch op3_gazebo robotis_world.launch
then from another terminal
source devel/setup.bash
roslaunch diag_op3_manager diag_op3_gazebo.launch
CODE GUIDE
- This repository contains a robot manager node called diag_op3_manager and a motion module called mpc_walking_demo.
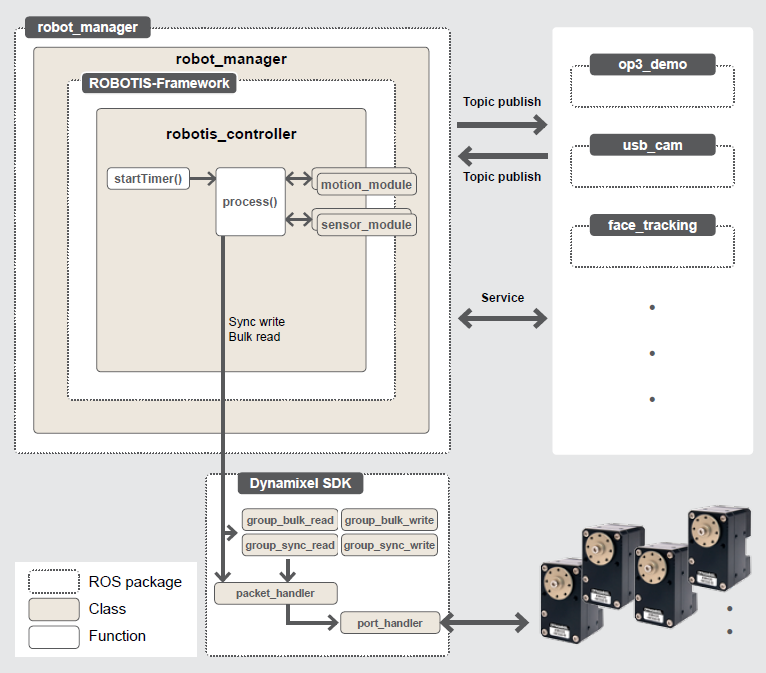
- The manager is in charge of applying the ROBOTIS Framework to the simulated or real hardware robot. Further details can be found here. In practice, the manager configures the robot and adds sensor and motion modules to the robotis controller. The system architecture is:
- The mpc_walking_demo motion module is where the kinematic controller and the real time MPC gait generation are implemented. At each sampling time the method op3LocomotionModule_walking_demo::process(..) is executed, accessing the motor encoders for measurements and providing reference commands to the low level motor controllers. Motor readings and command are provided in real time. From the motion module it is also possible to subscribe to topics/services/actions which are not part of the robotis framework, e.g., the IMU sensor, camera stream. A description of the control architecture is avaialble in the Robotis-OP3-MPC-walking.pdf file.
- The MPC gait generation is realized via a simple implementation of the method proposed in: Scianca, N., De Simone, D., Lanari, L., & Oriolo, G. (2020). MPC for humanoid gait generation: Stability and feasibility. IEEE Transactions on Robotics, 36(4), 1171-1188.