
{kind=link}
This document includes a high-level summary of project goals, protocol, and implementation.
SteamLink is a low-power netwoking platform. The SteamLink vision is to give makers the ability to rapidly and easily deploy fully self-hosted, robust, and secure networks of low-powered devices. Potential applications include data-driven citizen science projects and automation systems.
Currently the SteamLink project plans to support LoRa and WiFi devices.
WARNING: SteamLink is in active development and the protocol is subject to change. The current codebase has limited security features implemented and some portions are untested. Use at your own risk.
+-----------+
+-----------> | WiFi Node |
+----------+ | +-----------+
+----> | Database | |
| +----------+ |
v v
+---------------+ +-------- ---------+
| | | |
| | | | +-------+-------+ +-----------+
| | | | <---> | WiFi | LoRa | <---> | LoRa Node |
| Store | <----------> | MQTT Broker | +-------+-------+ +-----------+
| | | | BRIDGE
| | | |
| | | |
+---------------+ +------------------+
^
| +-----------+
| | Web |
+-------> | Console |
+-----------+
Made using this ascii editor
The SteamLink client arduino library have currently been tested on:
- Adafruit LoRa featherboards
- ESP8266
- ESP32
The store is implemented in Python and most unix like systems should be able to support it.
A SteamLink network comprises:
SteamLink Nodes can be thought of as "clients" in a SteamLink network. There are two types of nodes:
- Standard nodes: These nodes have a single physical interface to send and receive packets. As of the current SteamLink version, traffic from the store terminates at a standard node.
- Bridge node: These nodes have two physical interfaces and can pass packets from one physical interface to another.
The SteamLink store can be thought of as the "backend" of a SteamLink network. The SteamLink store provides the database, web-console, and a default message brokering facility for the network.
NB: All nodes in a SteamLink network have a unique SteamLink ID or slid for short. Bridge nodes have two slid
The SteamLink packet-flow is in two directions: "node -> store" and "store -> node". All packets include a header followed by a payload.
data packets as they usually contain sensor data and status messages.
Any node that can communicate directly to MQTT can send its data messages to: SteamLink/<slid>/data
| Field | Bits | Description |
|---|---|---|
op |
8 | Data packet op code (see below) |
slid |
32 | SteamLink ID of the node creating the packet |
pkg_num |
16 | Packet number/count set by the node creating the packet |
rssi |
8 | Describes the signal strength of the previous hop |
Data packets look like:
+----+------+---------+------+-----------+
| op | slid | pkg_num | rssi | payload...|
+----+------+---------+------+-----------+
NB Data message op codes have an odd bottom bit
| OP code | Hex | Type | Resp. from store | Payload | Description |
|---|---|---|---|---|---|
DS |
0x31 | USER | AN |
User payload | User packet to store |
BS |
0x33 | TRANSPORT | none | Encapsulated packet | Bridge data to store |
RC |
0x35 | ADMIN | SC |
msgpk {config, bool cold} |
Rpt cfg |
AS |
0x37 | ADMIN | none | {code, pkg_num} |
Ack from node -> store |
MS |
0x39 | USER | AN |
msgpk {mt} |
Logging and messaging service |
TR |
0x3B | TRANSPORT | none | Received test data | Test packet seen |
SS |
0x3D | SHARED | none | msgpk {sl_status, user_status, array counters} |
Status |
OF |
0x3F | ADMIN | none | msgpk, {sleep_duration} |
Sign-off, do not disturb |
control packets usually contain messages to configure and command the nodes.
Any node that can communicate directly to MQTT receives its control messages on: SteamLink/<slid>/control
| Field | Bits | Description |
|---|---|---|
op |
8 | Control packet op code (see below) |
slid |
32 | SteamLink ID of the destination node of the packet |
pkg_num |
16 | Packet number/count set by the node creating the packet |
Control packets look like:
+----+------+---------+-----------+
| op | slid | pkg_num | payload...|
+----+------+---------+-----------+
NB Control message op codes have an even bottom bit
| OP code | Hex | Type | Resp. from node | Payload | Description |
|---|---|---|---|---|---|
DN |
0x30 | USER | AS |
User payload | User packet from store |
BN |
0x32 | TRANSPORT | none | Encapsulated packet | Bridge data from store |
GS |
0x34 | ADMIN | SS |
none | Get status from node |
TD |
0x36 | ADMIN | none | Test data to send | Transmit test packet via radio |
SC |
0x38 | ADMIN | AS |
msgpk {cfg} |
Set cfg |
BO |
0x3A | ADMIN | none | msgpk {bool cold} |
Reboot node |
MN |
0x3C | ADMIN | AS |
msgpk {string mt} |
Message to node |
AN |
0x3E | ADMIN | none | msgpk {code, pkg_num} |
Ack from store -> node |
| Code | AN |
AS |
|---|---|---|
| 0x00 | Success | Success |
| 0x01 | Supressed duplicate pkt | Supressed duplicate pkt |
| 0x02 | Unexpected pkt, dropping | Unexpected pkt, dropping |
| 0x03 | Bad version, dropping | Bad version, dropiing |
| 0x04 | Unexpected size, dropping | Unexpected size, dropping |
pkg_num is an inflight unique packet number for USER and ADMIN packet types. It is not used for TRANSPORT packets.
SteamLink uses message pack for payloads for some messages.
The steamlink node structure looks like this:
struct SL_NodeCfgStruct {
uint8_t version;
uint32_t slid;
char name[10];
char description[32];
float gps_lat;
float gps_lon;
short altitude;
uint8_t max_silence; // in seconds
bool battery_powered;
uint8_t radio_params; // radio params need to be interpreted by drivers
};
TBD FEATURE Driver confiuration for ESP and LoRa to be part of config struct that can be sent over the air using SC op-codes
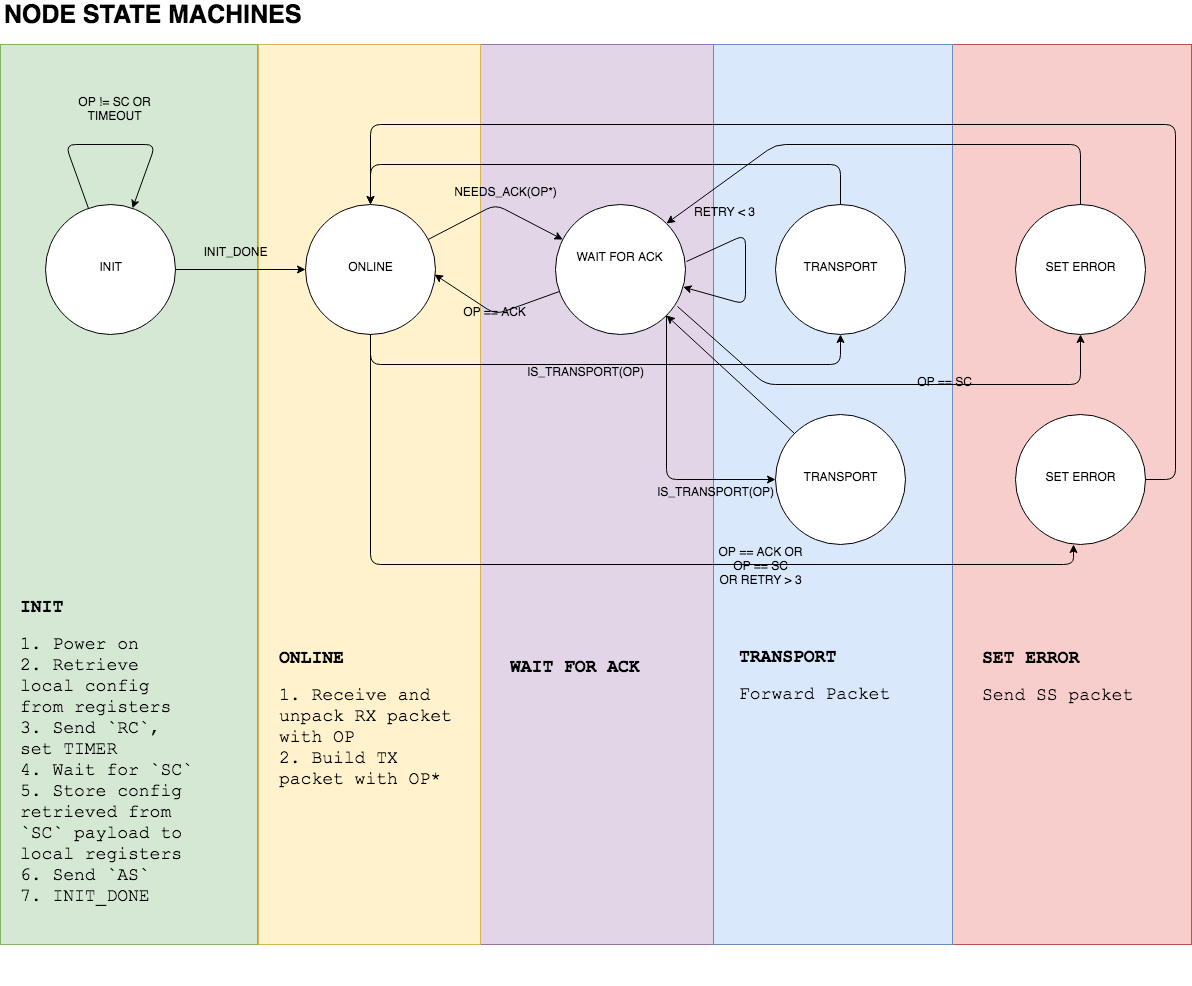
- Power on
- Retrieve local config from registers
- Send
RC - Wait for
SC - Store config retrieved from
SCpayload to local registers - Send
AS - Intialize and run
- User inputs config and clicks
save - Send
SCto node - Wait for
AS
NB The store needs to send a BO for node to activate reconfig. This is to allow multi-stage / multi-node reconfigurations.
Bridge nodes that support WiFi start up with an AP and host a webserver for reconfiguration of that bridge. See the WiFiManager library for more details.