


Click image to link to YouTube video.
- First install TurtleBot3 package and openmanipulator
http://emanual.robotis.com/docs/en/platform/turtlebot3/pc_setup/#pc-setup
http://emanual.robotis.com/docs/en/platform/turtlebot3/slam/#slam
http://emanual.robotis.com/docs/en/platform/turtlebot3/navigation/#navigation
http://emanual.robotis.com/docs/en/platform/turtlebot3/simulation/#simulation
http://emanual.robotis.com/docs/en/platform/openmanipulator/
$ sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_simulations.git
$ cd ~/catkin_ws && catkin_make
$ cd ~/catkin_ws/src- Second install gazebo_indus package
$ cd ~/catkin_ws/src/
$ git clone https://github.com/hyunoklee/gazebo_indus.git
$ cd ~/catkin_ws && catkin_make- setup model
$ eb export ROS_MASTER_URI=http://127.0.0.1:11311
export ROS_HOSTNAME=127.0.0.1
#export TURTLEBOT3_MODEL=burger
#export TURTLEBOT3_MODEL=waffle
export TURTLEBOT3_MODEL=waffle_pi $ sb-
Change move base parameter '''bash $ gedit ~/catkin_ws/src/turtlebot3/turtlebot3_navigation/param/dwa_local_planner_params_waffle_pi.yaml ''' modify below parameter
acc_lim_theta: 3.2 -> 6.5
sim_time: 2.0 -> 1.0 -
Run
$ cp ~/catkin_ws/src/gazebo_industrial/map/* ~/
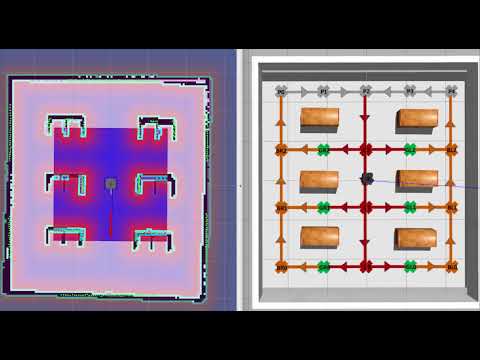
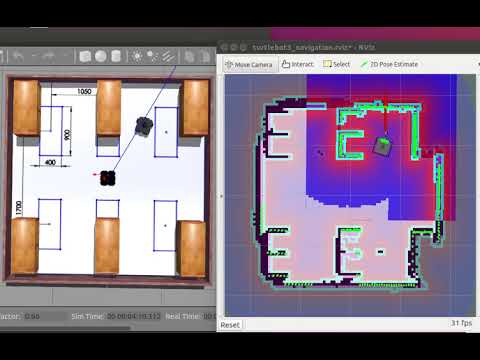
$ roslaunch gazebo_indus tb3_industrial.launch
$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/catkin_ws/src/gazebo_industrial/map/map.yaml
$ roslaunch gazebo_indus tb3_move_region.launchif you want to move turtlebot3 at Goal Region of room. ( there is Goal region GR0, GR1, GR2, GL0, GL1, GL2 )
$ rostopic pub /move_region/goal_region std_msgs/String "data: GL2" --once- with open manipulator launch & run
$ roslaunch gazebo_indus tb3_industrial_manip.launch
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
$ rostopic pub /open_manipulator/joint2_position/command std_msgs/String "data: -1.0" --once