Este repositório contém a implementação de um projeto que explora a utilização do Stage simulator e ROS para treinar robôs utilizando reinforcement learning.
- A pasta "docs" contém o report do trabalho desenvolvido.
- Ubuntu 18.04
- ROS Kinetic
- Stage simulator
- Turtlebot Stage package
- Crie uma pasta no seu catkin_ws chamada "rl_turtle"
- Clone o conteúdo deste repositório para a pasta criada
- Execute o comando catkin_make na pasta catkin_ws
- Source no arquivo devel/setup.bash
- É necessário dar permissão de execução aos arquivos Python. Utilize "chmod +x <nome_arquivo>.py"
- Inicie a simulação do Stage:
- roslaunch turtlebot_stage turtlebot_in_stage.launch
- Inicie o treinamento:
- rosrun rl_turtle environment.py
- Você pode acelerar a simulação passo-a-passo utilizando a tecla "]", ou pelo menu
- Os comandos devem ser executados em terminais separados
ATENÇÃO: Utilize os mapas contidos na pasta "maps" deste repositório, trocando a referência no arquivo de launch do pacote turtlebot_stage para o mapa desejado.
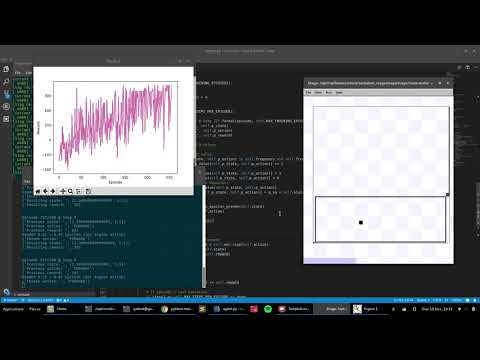
- Corridor environment training with Q-Learning
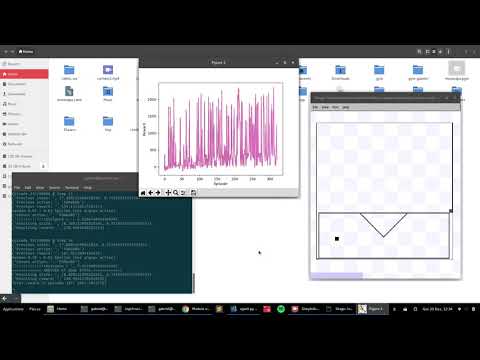
- Corridor with Obstacle environment training with Q-Learning
Gabriel Paludo Licks
Robótica Móvel Inteligente 2018/2