path planner
Receives goal descriptions by path_control or directly by some high level node and finds a path on the map. The map is optional and has to be provided by some external node. The currently seen obstacles are integrated into the map before the search begins. If no map is available, only the obstacles are used for planning.
There are three planners available:
- Kinematic Path Planner: Performs A* search using car-line kinematics
- Static Planner: Generates a predefined path, starting at the goal pose
- Course Planner: [experimental] Generates longer paths using predefined course lanes.
The node path_planner_node performs A* search with a car-like kinematic model.
Other kinematic models are also supported, however they are statically compiled.
| Name | Type | Default | Description |
|---|---|---|---|
| ~target_topic | string | /goal | Topic to subscribe for goal specification. |
| ~use_map_topic | bool | false | If false, use service to request map, otherwise subscribe map topic. |
| ~map_topic | string | /map | Name of the topic, that provides the map (only used if use_map_topic=true). |
| ~map_service | string | /dynamic_map | Name of the service, that provides the map (only used if use_map_topic=false). |
| ~base_frame | string | /base_link | Name of the robot frame. |
| ~algorithm | string | generic | The type of kinematic model to use. Can be one of generic, ackermann, 2d or also more specialized variants: summit, patsy, patsy_forward, summit_forward. |
| ~grow_obstacles | double | 0.0 | Radius which obstacles are grown by. |
| ~use_cloud | bool | true | When true, obstacle points in /obstacle_cloud are integrated into the map before path planning. |
| ~use_scan_front | bool | false | When true, laser measurements in /scan/front/filtered are integrated into the map before path planning. |
| ~use_scan_back | bool | false | When true, laser measurements in /scan/back/filtered are integrated into the map before path planning. |
| ~use_cost_map | bool | false | When true, use the costmap published on cost_map_service for optimization. |
| ~use_unknown_cells | bool | true | Allow planning through unknown cells. |
| ~oversearch_distance | double | 0.0 | Specify for how long the search continues after a first candidate solution has been found. The search stops at the first node that has a distance to the start larger than the first candidate + oversearch_distance. |
| ~penalty/backward | double | 2.5 | Penalty weight for path segments that have to be traversed in reverse. |
| ~penalty/turn | double | 4.0 | Penalty weight for switching direction on the path. |
| ~preprocess | bool | true | If true, the costmap for optimization is generated from the map using distance transform. |
| ~postprocess | bool | true | If true, the resulting path is interpolated and smoothed. |
| ~render_open_cells | bool | false | If true, the list of open cells is periodically published as grid cells. |
| Name | Type | Default | Description |
|---|---|---|---|
| ~use_collision_gridmap | bool | false | When true, the search uses a box model for collision checking (parameter size). Otherwise the robot is treated as a point. |
| ~size/backward | double | -0.6 | Distance from the center to the rear most point in the (forward direction.) |
| ~size/forward | double | 0.4 | Distance from the center to the front most point. |
| ~size/width | double | 0.5 | Width of the robot. |
| Name | Type | Default | Description |
|---|---|---|---|
| ~optimization/optimize_cost | bool | false | Activate path optimization (unstable.) Minimizes the a weighted sum of a cost map, the original path and a smoothness term |
| ~optimization/publish_gradient | bool | false | Publish a vector field as Markers representing the optimization gradient. |
| ~optimization/tolerance | double | 1e-5 | Maximum change in one iteration of the optimization considered as converged. |
| ~optimization/weight/cost | double | 0.75 | Weight of the cost term in optimization. |
| ~optimization/weight/data | double | 0.9 | Weight of the original path. |
| ~optimization/weight/smooth | double | 0.3 | Smoothness weight. |
| Name | Type | Description |
|---|---|---|
| goal (param: ~target_topic) | geometry_msgs/PoseStamped | Goal pose |
| map (param: ~map_topic) | nav_msgs/OccupancyGrid | Map |
| obstacle_cloud | sensor_msgs/PointCloud2 | (optional) Obstacles |
| scan/front/filtered | sensor_msgs/LaserScan | (optional) Front facing laser scanner |
| scan/back/filtered | sensor_msgs/LaserScan | (optional) Rear facing laser scanner |
| tf |
| Name | Type | Description |
|---|---|---|
| path | path_msgs/PathSequence | The final (refined) path |
| path_raw | nav_msgs/Path | Raw, unrefined path |
| visualization_marker | visualization_msgs/Marker | Individual Markers |
| visualization_marker_array | visualization_msgs/MarkerArray | Marker Arrays |
| rosout | rosgraph_msgs/Log | ROS logging |
| ~cells | nav_msgs/GridCells | List of open cells, if ~render_open_cells is true |
| ~cost | nav_msgs/OccupancyGrid | The currently used cost map. |
| ~map | nav_msgs/OccupancyGrid | The final map used for planning after integrating all obstacle information. |
The node static_path_node publishes a path that has been defined beforehand.
The path is specified as a sequence of straight lines and curves, starting at the goal pose specified in the request.
Using RViz, this means that the pre-planned path will start at the user-defined 2d nav goal (red arrow in the example below.)
The sequence has to be specified as a list [<segment_0>, ..., <segment_n>].
A segment <segment_i> can be one of:
-
[<distance>]for a straight line segment of distance<distance>. T he sign of the distance determines the direction, where a negative distance is meant to be driven in reverse. -
[<angle>, <radius>]for a curve with radius<radius>and the central angle<angle>.
rosparam set /static_path/segments "[ [3.141592, 4.0], [4.0], [-3.141592, 4.0], [-4.0] ]"

This path consists of four segments:
- (left) Curve segment with central angle π and radius 4m.
- (forward) Straight line of length 4m.
- (right) Curve segment with central angle π and radius 4m.
- (reverse) Straight line of length 4m.
Similarly to the static planner, the course planner uses hand designed segments for path planning. This planner, however, is more powerful: It plans a topological path on the segments.
The topological map consists of directed path segments. These segments are used for path planning, as demonstrated in the following image.
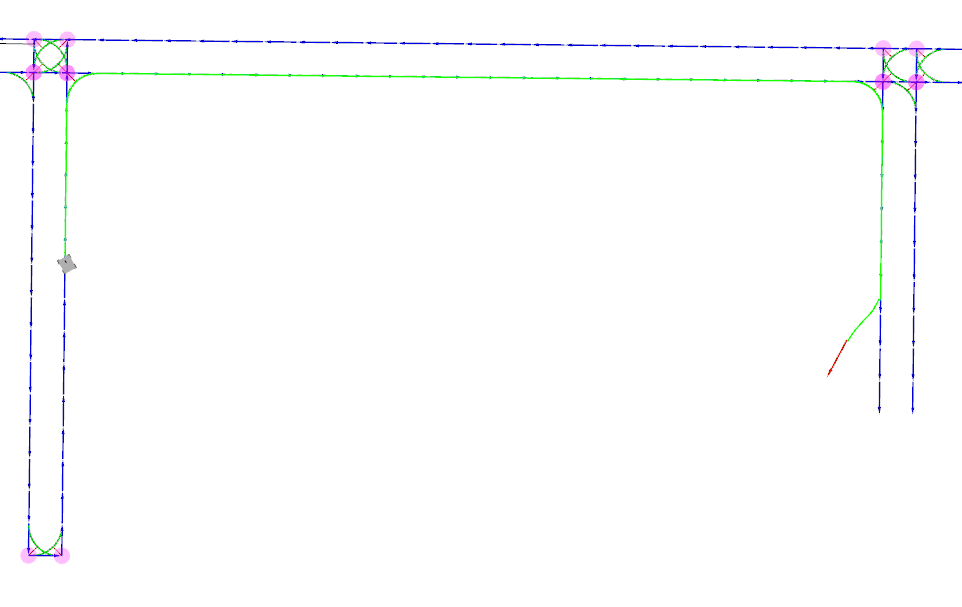
The path network shown above is a partial view of the segments generated by the following example:
<node name="course_planner" type="course_planner_node" pkg="path_planner" output="screen" respawn="true">
<remap from="plan_path" to="/plan_path_course" />
<param name="course/radius" value="0.9" />
<param name="course/penalty/backwards" value="10.0" />
<param name="course/penalty/turn" value="50.0" />
<param name="course/turning/straight" value="0.7" />
<rosparam param="map_segments">
[
[ [-2.0, 1.0], [-2.0, 0.0] ],
[ [-2.0, 0.0], [13.5, 0.0] ],
[ [13.5, -30.0], [13.5, 52.4] ],
[ [13.5, 52.4],[8.0, 52.4] ],
[ [8.0, 52.4], [8.0, 50.4] ],
[ [8.0, 50.4], [13.5, 50.4] ],
[ [12.5, 50.4], [12.5, -30.0] ],
[ [13.5, 1.0], [-2.0, 1.0] ],
[ [9.5, 52.4],[8.7, 59.0] ],
[ [7.2, 59.0], [8.0, 52.4] ],
[ [8.7, 59.0], [7.2, 59.0] ],
[ [13.5, -24.5], [2.5, -24.5] ],
[ [13.5, -25.5], [2.5, -25.5] ],
]
</rosparam>
</node>Transitions between the lines specified by map_segments are automatically generated at crossings.
A graph search is then performed:
- A generic search is performed starting at the robot's position. The search terminates once a map_segment is reached.
- Another search is performed from the goal pose in reverse. This search also terminates once a map_segment is reached.
- The topological graph is used to plan between the two points found by step 1. and 2.
| Name | Type | Default | Description |
|---|---|---|---|
| ~course/map_segments | list | A list of map segments. See the example below. | |
| ~course/radius | double | 1.0 | Curve radius for generating transitions between segments. |
| ~course/resolution | double | 0.1 | Segments are interpolated to this resolution. |
| ~course/penalty/backwards | double | 2.5 | Multiplicative penalty for backwards driving for the topological search. |
| ~course/penalty/turn | double | 5.0 | Additive penalty for changing driving direction for the topological search. |
| ~course/penalty/straight | double | 0.7 | Multiplicative penalty for backwards straight for the topological search. (Values < 1 encourage driving straight.) |
| ~max_distance_for_direct_try | double | 7.0 | First try to find a direct path, if start and goal are closer than this distance. |
| ~max_time_for_direct_try | double | 1.0 | When trying to find a direct path, stop after this timeout. |
Assuming the course_planner_node is running with the topic plan_path_course, the high level dummy can be ordered to use the course planner by changing the planning_channel parameter:
rosparam set /highlevel_dummy/planning_channel /plan_path_course
Then the goal selected in RViz is sent to the course planner while other planners can still be used at the same time on other channels.