High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting (ICCV 2017)
Copyright (c) 2019, NVIDIA Corporation and Technical University of Munich. All Rights Reserved. The Intrinsic3D source code is available under the BSD license, please see the LICENSE file for details. All data in the Intrinsic3D Dataset is licensed under a Creative Commons 4.0 Attribution License (CC BY 4.0), unless stated otherwise.
- Robert Maier, Technische Universität München
- Kihwan Kim, NVIDIA
- Daniel Cremers, Technische Universität München
- Jan Kautz, NVIDIA
- Matthias Nießner, Technische Universität München
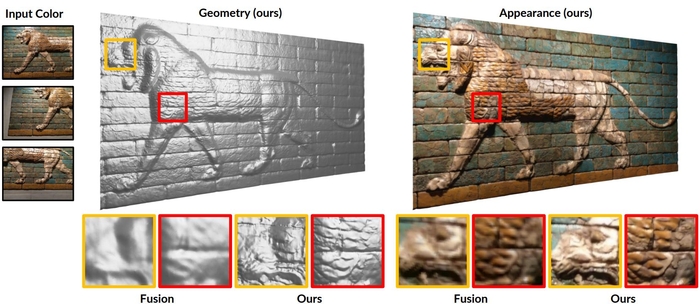
Intrinsic3D is a method to obtain high-quality 3D reconstructions from low-cost RGB-D sensors. The algorithm recovers fine-scale geometric details and sharp surface textures by simultaneously optimizing for reconstructed geometry, surface albedos, camera poses and scene lighting.
This work is based on our publication
- Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
International Conference on Computer Vision (ICCV) 2017.
If you find our source code or dataset useful in your research, please cite our work as follows:
@inproceedings{maier2017intrinsic3d,
title = {{Intrinsic3D}: High-Quality {3D} Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting},
author = {Maier, Robert and Kim, Kihwan and Cremers, Daniel and Kautz, Jan and Nie{\ss}ner, Matthias},
booktitle = {International Conference on Computer Vision (ICCV)},
year = {2017}
}
As the code was mostly developed and tested on Ubuntu Linux (16.10 and 18.10), we only provide the build instructions for Ubuntu in the following. However, the code should also work on Windows with Visual Studio 2013.
Please first clone the source code:
git clone https://github.com/NVlabs/intrinsic3d.git
Building Intrinsic3D requires CMake, Eigen, OpenCV 4, Boost and Ceres Solver (with CXSparse on Windows) as third-party libraries. The following command installs the dependencies from the default Ubuntu repositories:
sudo apt install cmake libeigen3-dev libboost-dev libboost-filesystem-dev libboost-graph-dev libboost-system-dev libopencv-dev
Please install Ceres Solver using the following commands (if not installed already):
# create third_party subdirectory (in Intrinsic3D root folder)
mkdir third_party && cd third_party
# install Ceres Solver dependencies
sudo apt install libgoogle-glog-dev libatlas-base-dev libsuitesparse-dev
# download and extract Ceres Solver source code package
wget http://ceres-solver.org/ceres-solver-2.1.0.tar.gz
tar xvzf ceres-solver-2.1.0.tar.gz
cd ceres-solver-2.1.0
# compile and install Ceres Solver
mkdir build-ceres && cd build-ceres
cmake .. -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=$PWD/../../ -DCXX11=ON -DSUITESPARSE=ON -DCXSPARSE=ON -DEIGENSPARSE=ON -DBUILD_EXAMPLES=OFF -DBUILD_TESTING=OFF
make -j6
make install
# go back into source code root
cd ../../../
To compile Intrinsic3D, use the standard CMake approach:
mkdir build
cd build
cmake .. -DCeres_DIR=$PWD/../third_party/lib/cmake/Ceres
make -j6
Download one of the RGB-D sequences from the Intrinsic3D Dataset. If you want to use one of your own datasets, you can convert it into the dataset format specified here. In the following, we will reconstruct and refine the Lion sequence using our approach.
# creating working folder in data/
cd ../data
mkdir lion && cd lion
# download, unzip and rename lion dataset
wget https://vision.in.tum.de/_media/data/datasets/intrinsic3d/lion-rgbd.zip
unzip lion-rgbd.zip
mv lion-rgbd rgbd
To run the Intrinsic3D applications, we continue in the current data folder data/lion/ and copy the default YAML configuration files into it:
# copy default configuration files into current data folder
cp ../*.yml .
The dataset configuration file sensor.yml is loaded in all applications and specifies the input RGB-D dataset.
Please note that the working folder of each application will be set to the folder containing the sensor.yml passed as argument.
The outputs will be generated in the subfolders fusion/ and intrinsic3d/ respectively.
We first run the keyframe selection to discard blurry frames, based on a single-frame blurriness measure:
../../build/bin/AppKeyframes -s=sensor.yml -k=keyframes.yml
This will generate the keyframes file fusion/keyframes.txt.
The window size for keyframe selection can be adjusted through the parameter window_size in the keyframes.yml configuration file.
Next, the RGB-D input frames are fused in a voxel-hashed signed distance field (SDF), which produces an output 3D triangle mesh fusion/mesh_0.004.ply and an initial SDF volume
fusion/volume_0.004.tsdf:
../../build/bin/AppFusion -s=sensor.yml -f=fusion.yml
Since the framework is very computationally demanding, it is recommended to crop the 3D reconstruction already during the SDF fusion process.
You can therefore specify the 3D clip coordinates (in absolute coordinates of the first camera frame) by setting the crop_* parameters in the fusion.yml configuration file.
To disable clipping, you can set all crop_* parameters to 0.0.
To accelerate finding a suitable clip volume, increase the voxel_size value and integrate keyframes only (by setting the parameter keyframes).
For reference, here are suitable crop bounds for the Intrinsic3D Dataset sequences:
Lion: left -0.09, right 1.55; top -0.58, bottom 0.26; front 0.0, back 2.0.
Gate: left -0.52, right 0.55; top -1.1, bottom 0.35; front 0.0, back 1.0.
Hieroglyphics: left -0.5, right 0.45; top -1.2, bottom 0.2; front 0.0, back 1.0.
Tomb Statuary: left -0.15, right 0.25; top -0.02, bottom 0.52; front 0.0, back 0.75.
Bricks: left -0.3, right 2.1; top -0.3, bottom 0.3; front 0.0, back 2.0.
The Intrinsic3D approach takes the initial SDF volume (fusion/volume_0.004.tsdf) and selected keyframes (fusion/keyframes.txt) and jointly optimizes the scene geometry and appearance along with the involved image formation model:
../../build/bin/AppIntrinsic3D -s=sensor.yml -i=intrinsic3d.yml
The output is generated in the subfolder intrinsic3d/, with the final refined 3D mesh stored as mesh_g0_p0.ply. The refined camera poses and color camera intrinsics are stored as poses_g0_p0.txt and intrinsics_g0_p0.txt respectively.
Intermediate results of coarser refinement levels are also output as
mesh_g*_p*.ply, where _g* specifies the SDF grid level and _p* stand for the RGB-D pyramid level (0 is always the finest/highest resolution).
The configuration file intrinsic3d.yml allows to adjust various parameters of the joint optimization method (e.g. hyperparameters for regularization terms).
In addition to only exporting the mesh colors, the output_mesh_* parameters enable other visualizations such as the refined albedo (set output_mesh_albedo to 1).
As the Intrinsic3D approach is computationally very demanding w.r.t. runtime and memory, it may require up to 32GB RAM during the optimization (even for object size reconstructions).
You can reduce the finest grid level resolution by decreasing the parameter num_grid_levels to reduce the memory usage. num_grid_levels: "3" means that the input SDF volume is upsampled twice; for an initial SDF grid with voxel size 0.004, the voxel size of the final refined SDF grid is 0.001.
If you have any questions, please contact Robert Maier <[email protected]> or Kihwan Kim <[email protected]>.