
ROS package suite for the lunar rovers at Hakuto project, a Google XPRIZE competitor.
.. contents:: Table of Contents :depth: 2
With this ROS package, we can realize Hakuto's Tetris robots in a simulated lunar surface on web browser. Document here is the end user's usage and server-side operation for maintanance tasks.
The simulator has been seen working on the following environment:
- Mac OSX 10.10
- Google Chrome 40.0
- Firefox 35.0
- Android 5.0.1
- Google Chrome 40.0
- Ubuntu Linux (12.04 and 14.04)
- Google Chromium 37.0
- Firefox 35.0
Under following circumstance the simulator limitedly works:
- MS Windows 7 (64bit)
- IE11
Users can access the simulator thru the following link: http://54.199.141.230:8080/# You'll see simulator similar to the following image:

Assigned keys vary per each OS and web browser. Typically you use mouse buttons and wheel, Shift key to control Zoom, Tilt and Elevation.
Then, users can send commands from another web page: http://54.199.141.230/joystick.html You'll see keys like below:
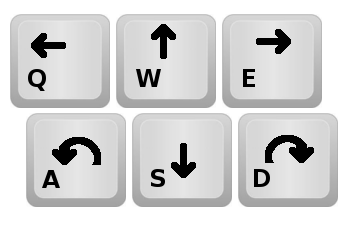
There you can use keyboard to send commands that are associated with each key. NOTE that the images in the web page are NOT buttons; they are there to indicate which keys are associated with what commands.
- Internet connection
- Ubuntu Linux. 12.04 or 14.04 64bit.
- Currently installation of web simulator is only limited to Ubuntu Linux (the limitation comes from
Gzweb, web frontend of the physics simulatorGazebo). - ROS Indigo Igloo
(TBA)
The directory ~/ros_ws/ will be used as a source directory for this instruction.
- Download
hakutoROS package.
$ mkdir -p ~/ros_ws/src && cd ~/ros_ws/src && catkin_init_workspace
$ git clone https://github.com/tork-a/hakuto.git
- Install depended libraries.
$ cd ~/ros_ws
$ rosdep install --from-paths src --ignore-src --rosdistro indigo -r -y
- Now ready to build sources.
$ catkin_make install && source install/setup.bash
-
Now let's install web frontend of the simulator,
Gzweb. Follow the official installation steps. Go through untilClone the repository and buildsection (ie. Stop beforeRunning gzserver, gzweb server, and WebGL clientsection). Select./deploy.sh -m. -
Place the necessary 3D model files of lunar surface by running the following commands.
$ cd %HOME_GZWEB%/http/client/
$ mkdir assets (create `assets` folder in case it doesn't exist)
$ ln -fs `rospack find tetris_description`/models/tetris/ .
%HOME_GZWEB% is where you intalled Gzweb. Also ,
$ cd %HOME_GZWEB%/http/client/assets (`assets` folder may not exist. If so, create it)
$ ln -fs `rospack find tetris_gazebo`/models/apollo15_landing_site_1000x1000 .
- Prepare joystick keypad (for tele-operation)
Tele-operation is done by using keyboardteleopjs that accepts command input from the keyboard through web browser.
Put a joystick.html file under the docroot of your web server. We use /var/www/ for apache in this document.
terminal-3$ cp `rospack find tetris_launch`/www/joystick.html /var/www/
You might need to edit the file using your web server's IP address, and the name of Twist topic. Do that by following the tutorial for keyboard teleop.
You need to open multiple terminals and run the following.
- Terminal-1: Run simulation engine, hakuto simulation moduels.
- Terminal-2: Run web frontend for the simulation engine.
terminal-1$ roslaunch tetris_launch demo.launch gui:=false
terminal-2$ DISPLAY=:0.0 ROS_MASTER_URI=http://%WEBSERVER_IPADDR%:13311 ROS_IP=%WEBSERVER_IPADDR% %HOME_GZWEB%/start_gzweb.sh &
(Example)
terminal-2$ DISPLAY=:0.0 ROS_MASTER_URI=http://54.199.141.230:13311 ROS_IP=54.199.141.230 /usr/local/lib/node_modules/gzweb/start_gzweb.sh &
Please see the manifest file of each package as follows for the description.
On Ubuntu, check if all the necessary processes are running. Example:
$ ps -ef | grep ros
ubuntu 4351 2660 0 Jan14 pts/10 00:15:08 /usr/bin/python /opt/ros/indigo/bin/roscore
ubuntu 4363 4351 0 Jan14 ? 00:19:58 /usr/bin/python /opt/ros/indigo/bin/rosmaster --core -p 11311 __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/master.log
ubuntu 4376 4351 0 Jan14 ? 00:23:56 /opt/ros/indigo/lib/rosout/rosout __name:=rosout __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/rosout-1.log
ubuntu 4450 2808 0 Jan14 pts/12 00:14:37 /usr/bin/python /opt/ros/indigo/bin/roslaunch tetris_gazebo tetris_world.launch gui:=false
ubuntu 4482 4450 0 Jan14 ? 00:00:00 /bin/sh /opt/ros/indigo/lib/gazebo_ros/gzserver /opt/ros/indigo/share/tetris_gazebo/worlds/apollo15_landing_site.world __name:=gazebo __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/gazebo-1.log
ubuntu 4490 4482 28 Jan14 ? 5-03:44:53 gzserver /opt/ros/indigo/share/tetris_gazebo/worlds/apollo15_landing_site.world __name:=gazebo __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/gazebo-1.log -s /opt/ros/indigo/lib/libgazebo_ros_paths_plugin.so -s /opt/ros/indigo/lib/libgazebo_ros_api_plugin.so
ubuntu 4744 3306 0 Jan14 pts/16 00:15:11 /usr/bin/python /opt/ros/indigo/bin/roslaunch rosbridge_server rosbridge_websocket.launch
ubuntu 4762 4744 7 Jan14 ? 1-08:06:14 python /opt/ros/indigo/lib/rosbridge_server/rosbridge_websocket __name:=rosbridge_websocket __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/rosbridge_websocket-1.log
ubuntu 4763 4744 7 Jan14 ? 1-06:59:59 python /opt/ros/indigo/lib/rosapi/rosapi __name:=rosapi __log:=/home/ubuntu/.ros/log/3e773a72-9c0c-11e4-ad41-0a43be0c09e0/rosapi-2.log
ubuntu 13117 11159 7 21:23 pts/4 00:00:05 python /opt/ros/indigo/lib/teleop_twist_keyboard/teleop_twist_keyboard.py cmd_vel:=tetris/cmd_vel
ubuntu 13181 12924 0 21:24 pts/18 00:00:00 grep --color=auto ros
Source code of hakuto package is opensourced at github repository: https://github.com/tork-a/hakuto
Desktop simulator version of Gazebo should be already installed by the previous steps (rosdep, in particular). We still need some customization.
- Link model files directory.
$ cd /usr/share/gazebo-%VERSION_NUMBER%
$ cd /usr/share/gazebo-2.2 (Example)
$ sudo ln -fs %YOUR_CATKIN_WORKSPACE%/src/osrf/gazebo_models models
$ sudo ln -fs ~/catkinws/src/osrf/gazebo_models models (Example following the directory used in above instruction)
$ roslaunch tetris_launch demo.launch gui:=false

- NOTE-1: 1st time run on a computer, internet access is required to download model files for Gazebo.
- NOTE-2:
GAZEBO_MODEL_PATHtakes absolute path.