diff --git a/docs/raspimouse/ros/samples.md b/docs/raspimouse/ros/samples.md
index e3d089c..f0e7877 100644
--- a/docs/raspimouse/ros/samples.md
+++ b/docs/raspimouse/ros/samples.md
@@ -160,6 +160,15 @@ robot: Raspberry Pi Mouse
+## カメラによるライントレース {: #camera-line-follower}
+
+=== "ROS 2"
+ 実行手順は[ROS 2サンプル集のcamera_line_follower](https://github.com/rt-net/raspimouse_ros2_examples#camera_line_follower){target=_blank rel=noopener}
+ を参照してください。
+ PCから操縦する場合はネットワークと環境変数を設定してください。
+
+
+
## LiDARでSLAM {: #slam}
=== "ROS"
diff --git a/docs/raspimouse/simulator/install.md b/docs/raspimouse/simulator/install.md
index a9c1727..ff81499 100644
--- a/docs/raspimouse/simulator/install.md
+++ b/docs/raspimouse/simulator/install.md
@@ -68,9 +68,16 @@ Raspberry Pi Mouse Simulator([rt-net/raspimouse_sim](https://github.com/rt-net
```sh
git clone -b humble-devel https://github.com/rt-net/raspimouse_ros2_examples.git
+ git clone -b humble-devel https://github.com/rt-net/raspimouse_slam_navigation_ros2.git
rosdep install -r -y -i --from-paths raspimouse*
```
+ キーボードで操作するためのパッケージをインストール
+
+ ```sh
+ git clone -b dashing https://github.com/ros2/teleop_twist_keyboard.git
+ ```
+
パッケージをビルド
```sh
diff --git a/docs/raspimouse/simulator/samples.md b/docs/raspimouse/simulator/samples.md
index 3dd0100..bf8e812 100644
--- a/docs/raspimouse/simulator/samples.md
+++ b/docs/raspimouse/simulator/samples.md
@@ -67,3 +67,99 @@ robot: Raspberry Pi Mouse
```
+
+## RGBカメラによるライントレース {: #camera_line_follower}
+
+=== "ROS 2"
+ 次のコマンドを実行します。
+
+ シミュレータの起動
+
+ ```sh
+ ros2 launch raspimouse_gazebo raspimouse_with_line_follower_field.launch.py use_rgb_camera:=true camera_downward:=true
+ ```
+
+ カメラライントレースを実行
+
+ ```sh
+ ros2 launch raspimouse_ros2_examples camera_line_follower.launch.py mouse:=false use_camera_node:=false
+ ```
+
+ 走行開始
+
+ ```sh
+ ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: false, switch1: false, switch2: true}"
+ ```
+
+ 走行停止
+
+ ```sh
+ ros2 topic pub --once /switches raspimouse_msgs/msg/Switches "{switch0: true, switch1: false, switch2: false}"
+ ```
+
+ カメラライントレースにおけるパラメータは[こちら](https://github.com/rt-net/raspimouse_ros2_examples?tab=readme-ov-file#parameters)を参照してください。
+
+ 
+
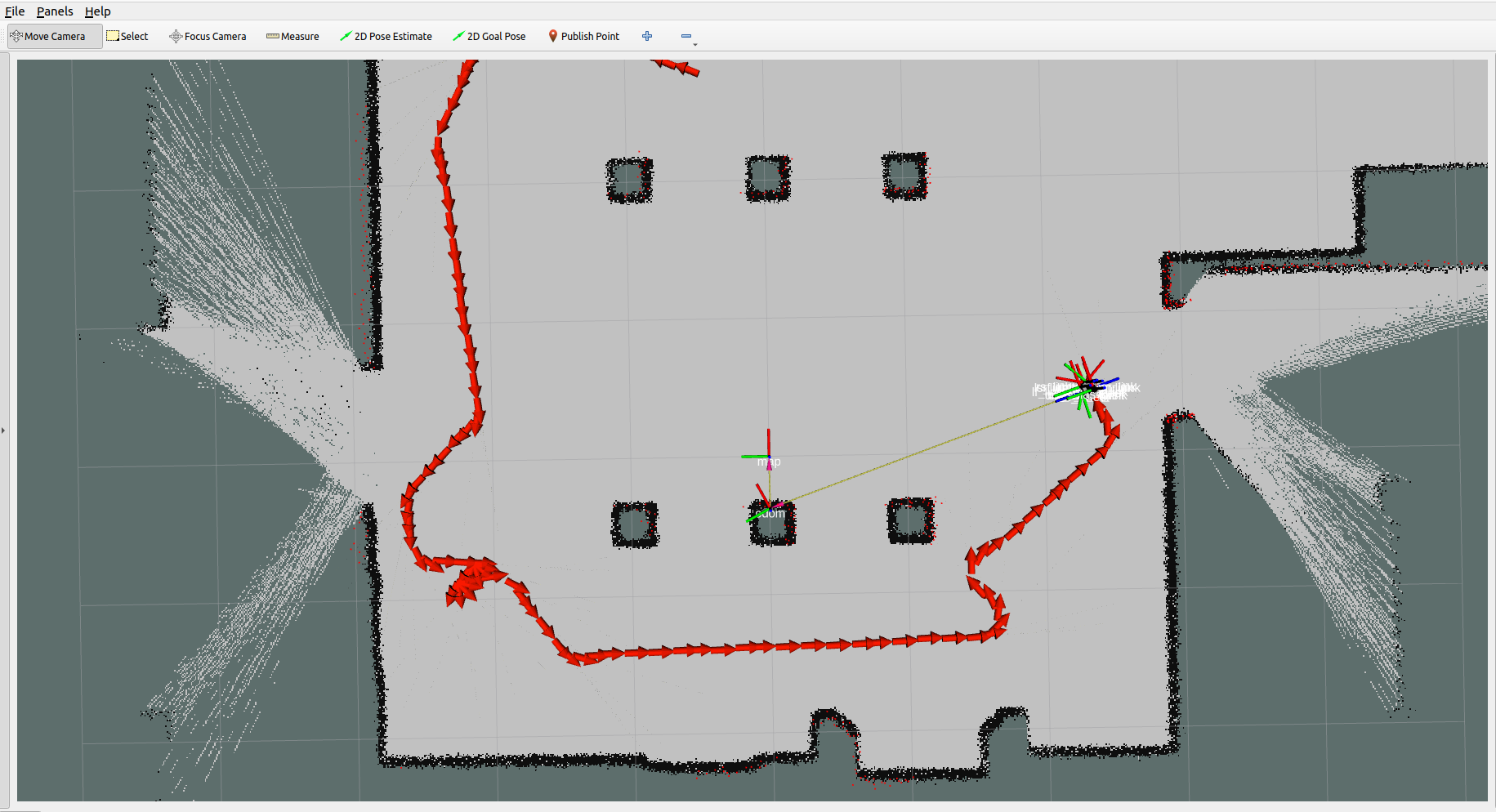
+## SLAM {: #slam}
+
+=== "ROS 2"
+ 次のコマンドを実行します。
+
+ シミュレータの起動
+
+ ```sh
+ ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urg
+ ```
+
+ `lidar`は`urg`、`lds`、`rplidar`のいずれかを指定してください。
+
+ キーボードで操作
+
+ ```sh
+ ros2 run teleop_twist_keyboard teleop_twist_keyboard
+ ```
+
+ SLAMを実行
+
+ ```sh
+ ros2 launch raspimouse_slam pc_slam.launch.py
+ ```
+
+ Raspberry Pi Mouseを走らせて地図を作成
+
+ 
+
+ 作成した地図を保存
+
+ ```sh
+ ros2 run nav2_map_server map_saver_cli -f ~/MAP_NAME
+ ```
+
+ `MAP_NAME`は任意の名前を指定できます。
+
+ 
+
+## Navigation {: #navigation}
+
+=== "ROS 2"
+ 次のコマンドを実行します。
+
+ シミュレータの起動
+
+ ```sh
+ ros2 launch raspimouse_gazebo raspimouse_with_lakehouse.launch.py lidar:=urg
+ ```
+
+ `lidar`は`urg`、`lds`、`rplidar`のいずれかを指定してください。
+
+ Navigationを実行
+
+ ```sh
+ ros2 launch raspimouse_navigation pc_navigation.launch.py map:=$HOME/MAP_NAME.yaml
+ ```
+
+ 引数`map`にはSLAMで作成した地図ファイルのパスを指定してください。
+
+ 
+