Warning This protocol is a work in progress and may change. It has an initial implementation in PX4 and QGroundControl (daily).
The MAVLink standard modes protocol allows a GCS to construct a UI allowing selection and display of available flight modes without prior knowledge of the connected flight stack.
The protocol provides:
-
Definitions of standard modes. These are modes that behave similarly enough across flight stacks that users can select and control them in the same way. For example, modes for taking off and landing, executing missions, holding position, and so on.
-
Enumeration of all flight modes supported by the flight stack, both standard and custom.
The provided flight mode information includes:
- Flags indicating whether particular custom modes can be selected or just displayed, and if they are displayed, whether they are advanced.
- A name/metadata string that can either be used to fetch metadata for the mode (such as a name and description), or directly as the name for custom modes.
-
Notification of the current mode.
-
A command to set a standard mode.
There are additional optional messages/features to allow:
- Modes to be enabled and disabled dynamically.
- Overriding of mode metadata (provide a metadata key).
MAVLink previously only standardized very high level base modes (defined in MAV_MODE), which cover things like whether the vehicle is ready to fly, being tested, manually controlled, under GCS manual control, or executing a mission. More specific flight behaviour/modes are defined in custom modes, which are specific to each flight stack.
Mechanisms are provided to set the base and custom modes (MAV_CMD_DO_SET_MODE), and the HEARTBEAT contains the current/active base_mode and custom_mode.
However, prior to the addition of this service, there were no mechanisms query the available custom modes, so a GCS would have to know about a flight stack in advance in order to construct its mode display and setting UI.
Most autopilots implement a set of custom flight modes that have very similar behaviour or intent, for example: position-hold mode, altitude-hold mode, mission mode, safety return/RTL. However because these are all identified by different custom mode identifiers on different flight stacks, there is no way to be sure what these "mean" without pre-existing knowledge.
This service defines standard modes, allowing a GCS to provide baseline support for common flight behaviour and test behaviour without explicit customisation for each autopilot. This is therefore a big step towards MAVLink being capable of being truly autopilot-agnostic for a useful minimal set of functionality.
For more information see MAVLink RFC0016 Standard modes.
| Message | Description |
|---|---|
| CURRENT_MODE | Get information about the current active mode, including both its standard and custom mode identifiers (if defined). Also "the intended mode", to indicate the case where setting a mode failed. |
| AVAILABLE_MODES | Get information about all available modes (both standard and custom) allowing generation of a UI and setting of modes. Requested using MAV_CMD_REQUEST_MESSAGE (set param2=0 for all modes). |
| AVAILABLE_MODES_MONITOR | Provides a sequence number that allows clients to determine if the set of available modes has changed, and hence whether the AVAILABLE_MODES must be re-requested. Sent on first mode change and subsequently streamed at low rate. |
| Enum | Description |
|---|---|
| MAV_STANDARD_MODE | Identifiers for the standard modes (modes that have a well understood meaning across flight stacks and vehicle types). Used in AVAILABLE_MODES and CURRENT_MODE. |
| MAV_MODE_PROPERTY | Properties of a mode supplied in AVAILABLE_MODES, which may be used for GCS layout. For example MAV_MODE_PROPERTY_NOT_USER_SELECTABLE indicates that a GCS should not include the mode in UI elements that allow mode selection. |
| Command | Description |
|---|---|
| MAV_CMD_DO_SET_STANDARD_MODE | Enable the specified standard MAVLink mode (MAV_STANDARD_MODE). ACK with MAV_RESULT_FAILED if the mode is not supported by the vehicle. |
| MAV_CMD_REQUEST_MESSAGE | Used to request AVAILABLE_MODES message |
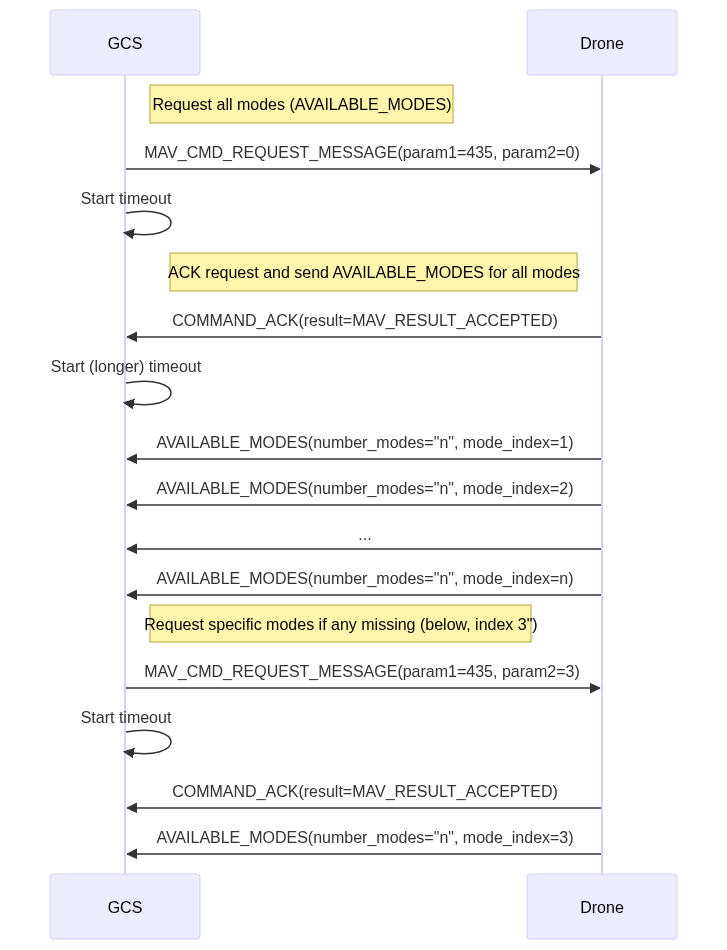
All available modes can be enumerated by using MAV_CMD_REQUEST_MESSAGE to request the AVAILABLE_MODES (435) message.
Each AVAILABLE_MODES message includes the total number of modes and the index of the current mode, so a GCS should first query for all modes (MAV_CMD_REQUEST_MESSAGE.param2=0), and then individually query for any AVAILABLE_MODES message that it missed (MAV_CMD_REQUEST_MESSAGE.param2="missing index number").
Notes:
AVAILABLE_MODESincludes the total number of modes and the index of the current mode. This indexing is provided to allow a GCS to confirm that all modes have been collected, and re-request any that are missing. It is internal and should not be relied upon to have any order between reboots or if the set of available modes changes.- The GCS can request this message using
MAV_CMD_REQUEST_MESSAGE, specifying either "send all modes" or "send mode with this index". - The flight stack should only emit a single
AVAILABLE_MODESfor each mode on each request. If a mode is both custom and standard it should be emitted as a "standard mode" (this allows the GCS to list the "standard modes" and separately show the additional "custom modes"). - The modes that are emitted depend on the current vehicle type. For example, "takeoff" would not be emitted for a rover type, but would for a copter.
The sequence for requesting all modes is shown below:
In addition to the fields for enumerating the available modes, AVAILABLE_MODES has the following fields:
standard_mode: The standard mode represented by thisAVAILABLE_MODES(MAV_STANDARD_MODE).0for a custom mode that is not also a standard mode (MAV_STANDARD_MODE_NON_STANDARD).custom_mode: The id of the custom mode represented by thisAVAILABLE_MODES(if any).properties: Flags indicating the UI properties of this mode. These provide hints about where the mode can/should appear in the UI. For example,MAV_MODE_PROPERTY_NOT_USER_SELECTABLEindicates that the mode should not be set by a user, and hence should not appear in selection lists, whileMAV_MODE_PROPERTY_ADVANCEDindicates a mode that is harder to fly, and might be visually separated from other modes in the UI.mode_name: Mode metadata key or name, with null termination character.- The field can act as both a key for determining metadata associated with the mode, or as a fallback name to use for the mode if the GCS has no metadata.
- It can be used to override metadata on existing modes, for example to enhance standard metadata with additional information about autopilot-specific behaviour, or can provide metadata for any other static or dynamic mode.
- The field must be human readable and autopilot-unique.
- Generally does not have to be set for standard modes, where the ground station might be expected to already have metadata (but if it is, it will be used as a metadata key).
- For more information see Modes Metadata below.
Standard modes can be set using the MAV_CMD_DO_SET_STANDARD_MODE command.
This will ACK with MAV_RESULT_ACCEPTED if the mode can change, and MAV_RESULT_FAILED if the particular standard mode is not supported.
Custom modes must be set with MAV_CMD_DO_SET_MODE.
Note If both
standard_modeandcustom_modeare set you can determine the mapping between modes and might therefore use MAV_CMD_DO_SET_MODE to set a standard mode.MAV_CMD_DO_SET_STANDARD_MODEis preferred for setting standard modes.
The current active mode is provided in CURRENT_MODE, which has both standard mode and custom mode fields.
This is streamed (nominally 0.5 Hz). A GCS can use it to configure the UI and display appropriate metadata for the current mode.
The message also has an intended_custom_mode field, which indicates the last (custom) mode that was commanded.
This should match the custom_mode but might not if a commanded mode cannot be entered, or if the mode is exited due to a failsafe.
Note that the current custom mode is also published in the HEARTBEAT.
The AVAILABLE_MODES_MONITOR is an optional part of the protocol that allows a MAVLink system to dynamically change the set of modes it supports at runtime (for example, using Lua or other onboard scripting languages, or offboard from a companion computer).
The message sequence number field is iterated sequentially whenever the set of available modes change. A GCS can detect this change and re-request the set of AVAILABLE_MODES.
The message should be emitted when the set of available modes changes. After the set of modes changes the first time, it should also be streamed at low rate (nominally 0.1 Hz).
Mode metadata is the information that a ground station uses represent a mode in the UI. This includes the mode name, but might also include descriptions, translations and other information (mode metadata schema is yet to be defined).
A GCS may already have knowledge of standard or custom modes and can provide this metadata based on the mode, or their might be particular "additional" information that it can provide.
The mode_name can be used as a key for finding this metadata, or as a fallback string if the GCS has no metadata for the mode.
Ground stations are expected to use the following "fallback" approach for matching modes to their metadata:
mode_namefield as a metadata key. If this field is defined and can be matched to metadata, the metadata should be used for the mode.standard_mode: Use metadata associated with this standard mode if no metadata can be matched usingmode_name.custom_mode: Use metadata associated with the custom mode if no metadata can be matched usingmode_nameorstandard_mode.mode_namefield as a fallback mode name string. This should be used as the name if no other metadata can be mapped.
This allows "full" autopilot-specific metadata to be provided for modes, including dynamic modes such as Lua scripts (where the custom_mode might be dynamically allocated).
It also allows overriding of any existing metadata for any mode with vehicle-specific data.
In the worse case, if there is no metadata for a custom mode, the mode_name string can still be used to represent the mode in the UI.
Note that the mode_name must be human readable and unique for the autopilot.
PX4 v1.15 and later supports this service, including the optional part (AVAILABLE_MODES_MONITOR) (this allows ROS2 modes added using the PX4 ROS 2 Interface Library to be dynamically updated in a GCS).
At time of writing it only exposes the standard modes that are common to all vehicles as standard modes, such as takeoff and landing, and missions.
QGC also uses this service to build the mode display/setting UI, when supported by the autopilot. This feature is supported in daily builds (at time of writing).